
Mission Summary:
To design and implement a system with a rocket capable of reaching a designated target altitude and safely deploy a rover capable of safe landing, image capture, and locomotion.



Mission Overview:
At apogee (1200 ft), altimeter signals for drogue chute deployment
At 800ft, the main chute deploys, and the altimeter signals a secondary ejection charge to push the nose cone and rover from the body tube.
The nose cone and body tubes descend safely to the ground.
An accelerometer onboard the rover detects ejection and begins operating controlled descent phase.
On touchdown, the controlled descent mechanism is released as first marker
The accelerometer signals that the rover is in Idle phase
The rover drives forward 10 ft and releases second marker.
The rover turns 360° and takes four photographs (Each 90° apart)
The rover turns 90° and drives forward 10ft.

Rocket Design

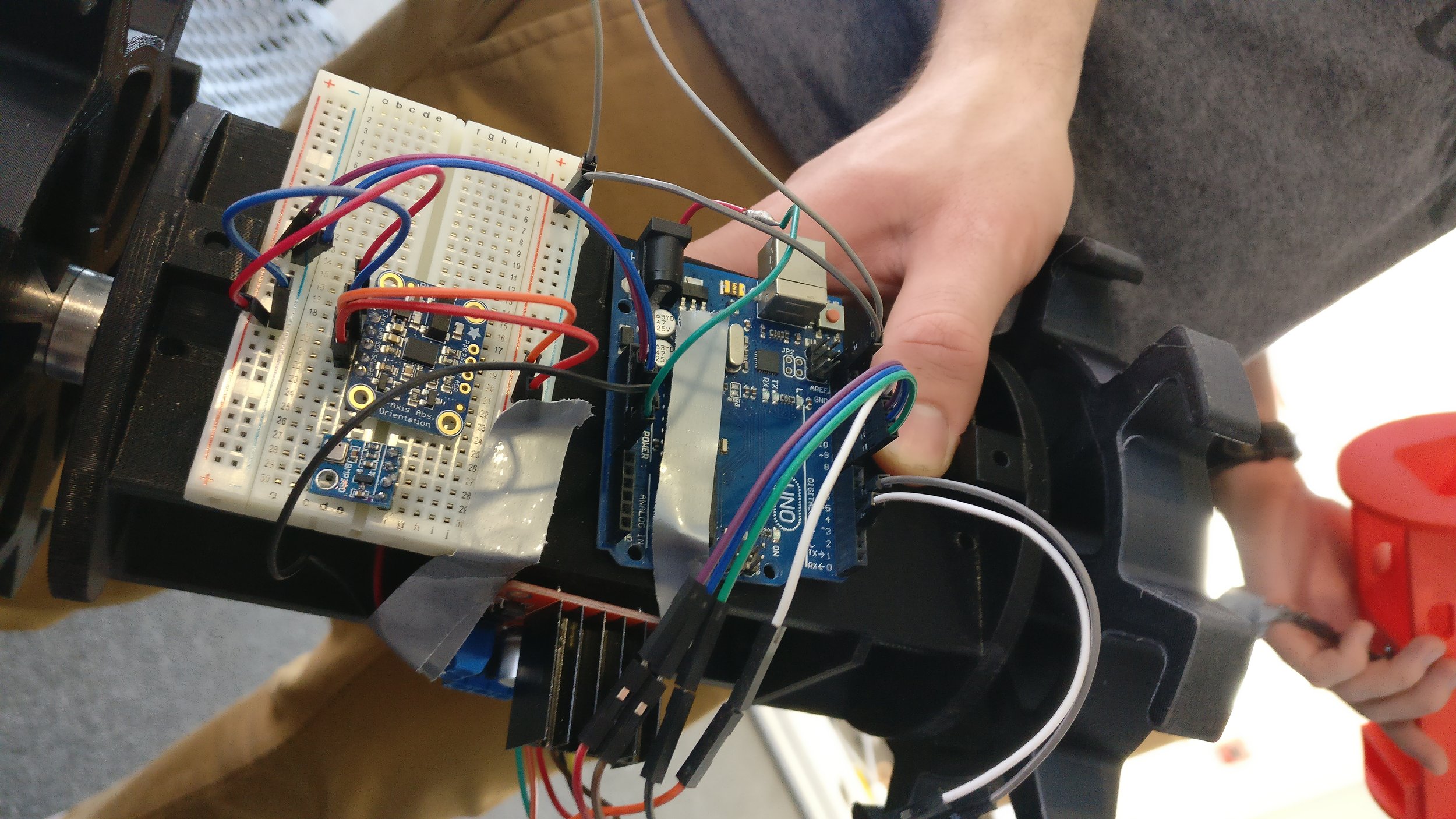
Rover Design
If you have any questions about this competition please email us at terrapinrocketry@gmail.com also a video of our launch can be found at https://youtu.be/r22NQLhu8QQ.
Justin Becker
Computer Engineering
Matthew Bernstein
Aerospace Engineering
Victor Cheung
Mechanical Engineering
Kenneth Jiang
Computer Science
Mannuel Lacarra
Aerospace Engineering
Adam Sand
Mechanical Engineering
Alexander Yu
Computer Science